Questa innovazione riguarda un sistema di trasmissione del moto tra il motore e le ruote di un veicolo, noto nell’industria automobilistica come “cambio delle marce”. Il sistema offre la flessibilità di regolare la potenza e/o la velocità di trasmissione mediante ingranaggi. È applicabile in tutti i contesti in cui si utilizzano trasmissioni a ingranaggi, come veicoli e riduttori industriali di velocità.
L’innovazione si distingue per essere un sistema composto da una serie di ingranaggi organizzati in moduli. Ogni modulo rappresenta un modello di disposizione degli ingranaggi da seguire. Un singolo modulo in questa invenzione è un’unità base che può essere replicata nella disposizione degli ingranaggi, anche se non necessariamente nelle dimensioni. L’insieme di più moduli, collegati e coordinati, costituisce un sistema complesso il cui funzionamento è gestito mediante logica binaria (matematica digitale).
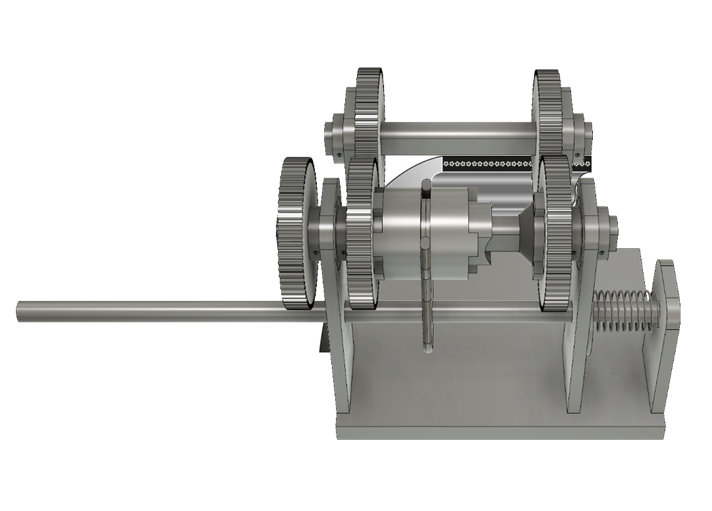
L’obiettivo di questa invenzione è proporre un sistema di trasmissione modulare in cui un’unità base, ripetuta nella disposizione dei suoi ingranaggi, può dar vita a un sistema complesso. Grazie a questa innovazione, utilizzando solamente 4 moduli, è possibile ottenere ben 16 differenti rapporti di trasmissione.
La base di questa invenzione è la matematica binaria, conosciuta come logica digitale. Questo ramo matematico è fondamentale nell’elettronica digitale, nell’informatica e nella maggior parte dei dispositivi elettronici che utilizziamo quotidianamente, come computer, televisori, telefoni, macchine fotografiche e molti altri.
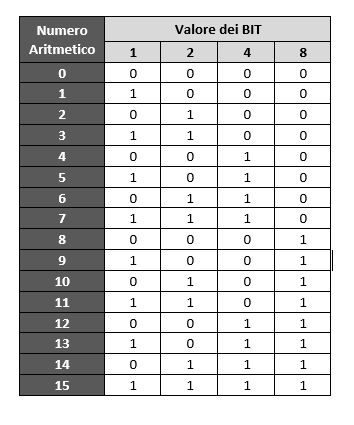
Nella matematica binaria, i numeri sono costituiti da sequenze di zero (0) e/o di uno (1). Ciascuna cifra all’interno di questa sequenza è chiamata “bit”, mentre l’intera sequenza è nota come “byte”. In questa matematica, ogni bit all’interno di un byte ha un valore specifico basato sulla sua posizione, creando così un “codice binario”. La trasformazione del codice binario in numeri aritmetici avviene sommando i valori rappresentati dai singoli bit all’interno del byte.
Per esempio, se consideriamo un byte composto da quattro bit, ciascuno con i valori 1, 2, 4, 8; se la sequenza fosse 1100, il numero aritmetico corrispondente sarebbe 3 (1+2+0+0), mentre se la sequenza fosse 0011, il numero aritmetico sarebbe 12 (0+0+4+8).
Il numero di combinazioni possibili in un byte è pari a 2 elevato al numero di bit che lo compongono.
Ad esempio, il numero di combinazioni possibili in un byte composto da:
1 bit è uguale a 2^1 = 2
2 bit è uguale a 2^2 = 4
3 bit è uguale a 2^3 = 8
4 bit è uguale a 2^4 = 16
5 bit è uguale a 2^5 = 32
Nella tabella seguente sono elencati i valori aritmetici corrispondenti alle varie combinazioni di un byte formato da 4 bit.
Quindi, in sintesi, ogni modulo in questa invenzione funziona su due livelli di rapporto di trasmissione: uno stato di riposo in cui non altera la potenza in uscita (condizione 0) e uno stato attivo in cui il modulo trasforma la potenza in uscita rispetto a quella in ingresso (condizione 1).
Chiamando “Ratio” il rapporto di potenza tra ingresso e uscita di ciascun modulo, ecco un esempio pratico:
Se un modulo non è attivato (stato di riposo), il suo rapporto (Ratio) è 1.
Se un modulo è attivato, il suo rapporto (Ratio) è il rapporto progettato per quel modulo.
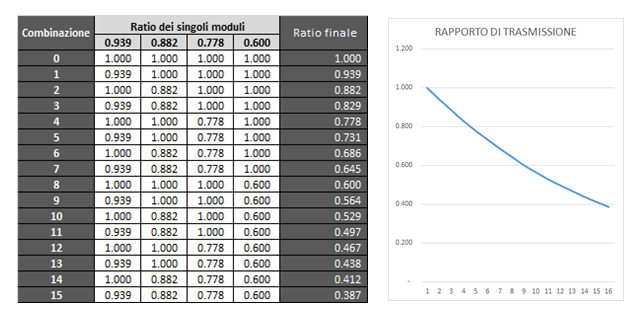
Per esempio, in un sistema a 4 moduli, se un modulo è attivato, i suoi rapporti sono:
Rapporto del modulo 1 = 0.939
Rapporto del modulo 2 = 0.882
Rapporto del modulo 3 = 0.778
Rapporto del modulo 4 = 0.600
Questi moduli sono collegati in cascata, in modo che l’uscita di un modulo diventa l’ingresso del modulo successivo. In questo esempio, la riduzione della potenza da un modulo precedente viene ulteriormente ridotta dal successivo. Di conseguenza, il rapporto totale del sistema è il prodotto dei rapporti di tutti i singoli moduli, come mostrato nell’esempio nella tabella seguente.
Questa innovazione si concentra sulla replicabilità strutturale dei moduli, consentendo ai progettisti di personalizzare liberamente il sistema. Il numero di moduli, il rapporto di ogni modulo, l’ordine, i servomeccanismi di controllo, i componenti elettronici e le schede programmabili, nonché la programmazione del software, possono essere definiti secondo le esigenze specifiche del progetto.
È possibile ottenere un rapporto totale superiore a 1 cambiando il rapporto tra gli ingranaggi.
Un aspetto chiave di questa innovazione è l’uso di servomeccanismi per attivare i singoli moduli, utilizzando ad esempio elettromagneti, valvole di controllo per liquidi pressurizzati o altri sistemi che consentano una commutazione rapida e sicura. La gestione degli impulsi può essere facilmente eseguita attraverso schede elettroniche digitali programmabili, facilmente reperibili anche online a basso costo. Il software può variare da un’interfaccia semplice per simulare un cambio manuale a una piattaforma più sofisticata in grado di analizzare sensori ed automatismi, ottimizzando l’efficienza della trasmissione tra potenza e velocità.
Durante il cambio delle marce, l’isolamento del sistema sia all’ingresso che all’uscita mediante l’uso di frizioni può facilitare una sincronizzazione più veloce e agevole degli ingranaggi.
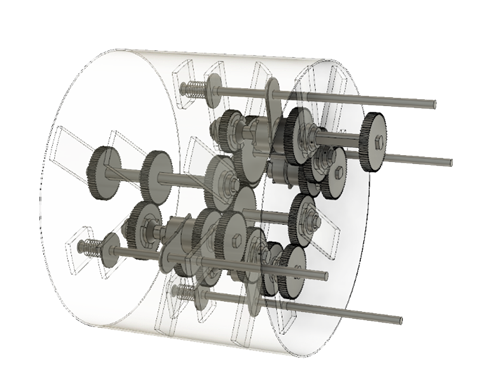
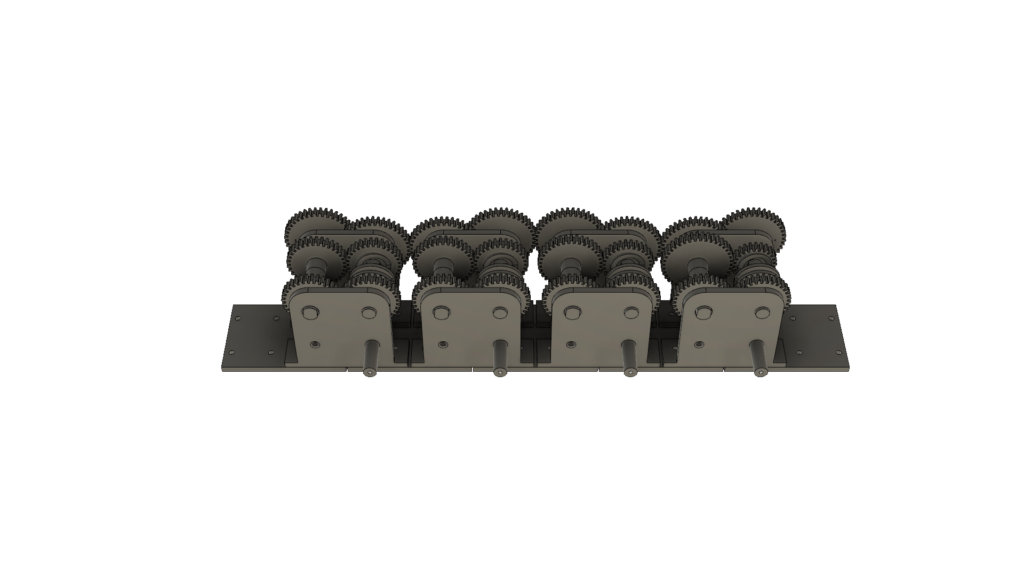
La flessibilità di questa invenzione consente di disporre i moduli sia linearmente su una base rettangolare che all’interno di un contenitore circolare, senza compromettere funzionalità, prestazioni o spazi tra i moduli.